
About me
Hi! I am a Ph.D. student in Mechanical Engineering at the University of California, Berkeley. I work in the ICON Lab under Prof. Negar Mehr. My research focuses on robot learning, especially on developing autonomous robots that can work alongside humans and other robots.
Prior to Berkeley, I earned my B.S. in Mechanical Engineering from Yonsei University. During my undergraduate studies, I worked as a research intern in MLCS Lab under Prof. Jongeun Choi, where I worked on MPCs and RL for autonomous driving, as well as visuamotor policy learning for contact-rich manipulation.
Research
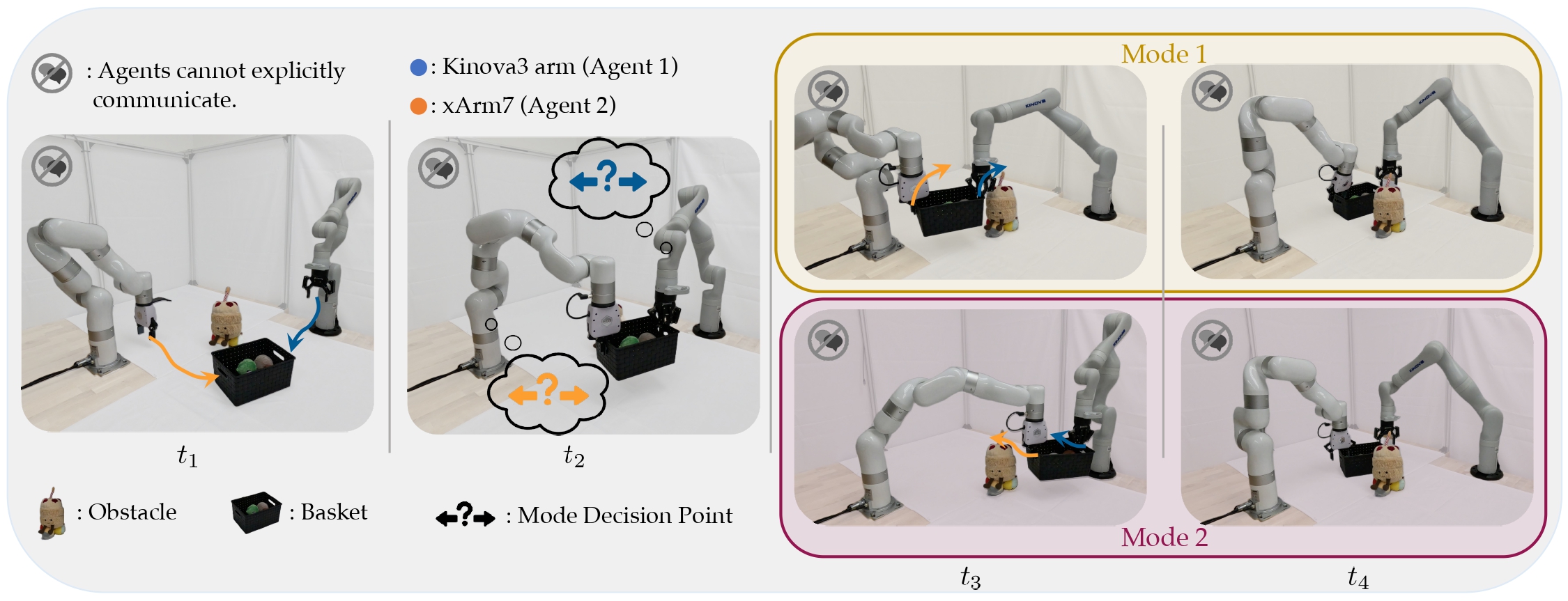
My research lies at the intersection of robot learning, control, and foundation models. I study how LLMs and VLMs can guide reinforcement learning to acquire complex, coordinated robot behaviors. This includes building curriculum-driven frameworks such as CRAFT for multi-robot collaboration and extending them toward humanoid whole-body control and multi-humanoid interaction.
In parallel, I explore scalable imitation learning methods that can transfer single-robot expertise to multi-robot settings, where data collection is especially challenging. Ultimately, I aim to develop autonomous systems that can learn efficiently, coordinate intelligently, and operate alongside humans and other robots.
News
| Sep, 2025 | I am excited to announce that my first first-authored paper CRAFT is now available in Arxiv. |
| Jul, 2025 | I was selected as one of the best 10 research proposals in the Google-BAIR Commons Annual Workshop. |
| Apr, 2024 | I will start my Ph.D at UC Berkeley, beginning Fall 2024. 🥳 |
Publications

S. Choi*, K. Ryu*, J. Ock, and N. Mehr (*Equal contribution)
Submitted to ICRA, 2026.
D. Dong*, M. Bhatt*, S. Choi, and N. Mehr (*Equal contribution)
Submitted to ICRA, 2026.
J. Seo, A. Kruthiventy, S. Lee, M. Teng, X. Zhang, S. Choi, J. Choi, and R. Horowitz
Submitted to RA-L.